BSM-SG/QFG φΨ Engine – Simulation Overview
The purpose of those simulations and our simulation engine is to apply mathematical models to simulate the dynamic properties between the etheric medium of space according to BSM-SG, and elementary particles in all their possible configurations. For this purpose, the concept of matter adopted in theoretical physics should be considered as a state of the primary protomatter in the etheric medium of space, which appears as measurable gravitational mass and inertia.
1. Genesis — Emergence of matter with its measurable parameter mass and inertia in the physical vacuum space.
Core idea: Matter spontaneously forms from vacuum instability.
- φ (phi) represents vacuum energy density.
- ψ (psi) represents emergent matter/energy density.
- Based on a modified 3D Gray–Scott reaction–diffusion model.
- A localized perturbation (“Big Bang”) collapses φ and injects ψ.
- Nonlinear φ–ψ coupling produces self-organizing structures:
- vortices
- filaments
- proto-galactic clusters
What it demonstrates
- Matter is not predefined — it emerges
- Vacuum is active, not empty
- Structure forms from instability
2. Antigravity / Telekinesis — Vacuum-Controlled Matter Flow
Core idea: Manipulating vacuum potential directly moves matter.
- φ acts as a controllable gravitational potential
- ψ is a voxelized matter cloud
- User-controlled target creates:
- negative φ → pull (attraction)
- positive φ → push (repulsion)
- ψ flows strictly along ∇φ (potential gradient)
Unique features
- Camera can be locked inside the φ-sphere (“inside the gravity lens”)
- No rigid bodies — everything is field-driven
- Matter behaves like compressible plasma
What it demonstrates
- Gravity as vacuum geometry
- Telekinesis without forces, only potentials
- Observer inside the field, not outside the system
3. Phase Transition — Solid → Liquid → Plasma
Core idea: Matter phase depends on internal energy, not material type.
- ψ = matter density
- Additional scalar field: temperature / entropy
- Below threshold → rigid solid
- Above threshold → fluid-like flow under gravity
- Laser heating triggers localized melting
What it demonstrates
- Phase is a state, not a material
- Structural collapse emerges naturally
- Energy controls coherence
4. Material Architect — Atomic Lattices & Resonance
Core idea: Materials are defined by lattice geometry and resonance, not labels.
- Discrete atomic lattices are voxel-generated:
- Simple cubic
- Face-centered cubic
- Diamond / complex lattices
- Each element has:
- mass (vacuum distortion strength)
- lattice spacing
- intrinsic BSM-SG resonance frequency
- External beam injects ψ (electrons)
Superconductivity model
- When beam frequency ≈ lattice resonance
- And temperature is low:
- φ becomes negative
- scattering → zero
- ψ flows coherently
What it demonstrates
- Superconductivity as φ-state, not magic
- Resistance = positive φ
- Tunneling = negative φ
5. RC Column Crush Lab — Field-Based Structural Failure
Core idea: Structural failure emerges from micro-constraints, not FEM equations.
- Reinforced concrete column built from particles + bonds
- Multiple bond types:
- concrete
- rebar
- axial
- shear
- stirrups
- Press applies increasing axial load
- Bonds break based on strain limits
- Cracks classified:
- axial
- shear
- bending
Engineering layer
- Eurocode-inspired Nᴿᴅ calculation shown in real units
- Visual utilization ratio (Nᴱᴅ / Nᴿᴅ)
What it demonstrates
- Cracks are emergent events
- Failure modes self-classify
- Structural behavior without FEM meshes
6. Rigging Truss Sag Lab — Load, Deflection & Collapse
Core idea: Large-scale structures fail gradually, not instantly.
- Truss built from particles and constraints
- Rigging cables modeled as tension-only bonds
- Increasing load produces:
- elastic sag
- plastic deformation
- bond rupture
- Realistic deflection tracking
What it demonstrates
- Load paths
- Progressive failure
- Visual intuition for rigging safety
7. Multi-Material Impact Playground
Core idea: Impact outcome depends on relative material properties.
- Voxel-based object impacts a destructible floor
- Materials defined by:
- mass
- stiffness
- bond strength
- hardness
- Scenarios:
- hard object → brittle floor → penetration
- brittle object → hard floor → shattering
What it demonstrates
- Fracture is contextual
- Hardness ratio matters more than absolute strength
- Energy-driven failure
8. Tri-Magnet Chaos Pendulum
Core idea: Deterministic systems can be unpredictable.
- Pendulum influenced by three magnetic attractors
- Nonlinear dynamics → chaotic motion
- Two modes:
- single pendulum (trajectory)
- basin mode (fractal attractor regions)
- Outcome depends sensitively on initial conditions
What it demonstrates
- Chaos from simple laws
- Fractal basins of attraction
- Deterministic ≠ predictable
Conceptual Unification (Very Important)
Across all simulations:
- ψ (psi) = what moves (matter, electrons, energy)
- φ (phi) = how space allows movement (vacuum, resistance, potential)
Everything is:
- voxelized
- local
- emergent
- field-driven
No hidden forces.
No predefined behavior.
Only φ shaping ψ.
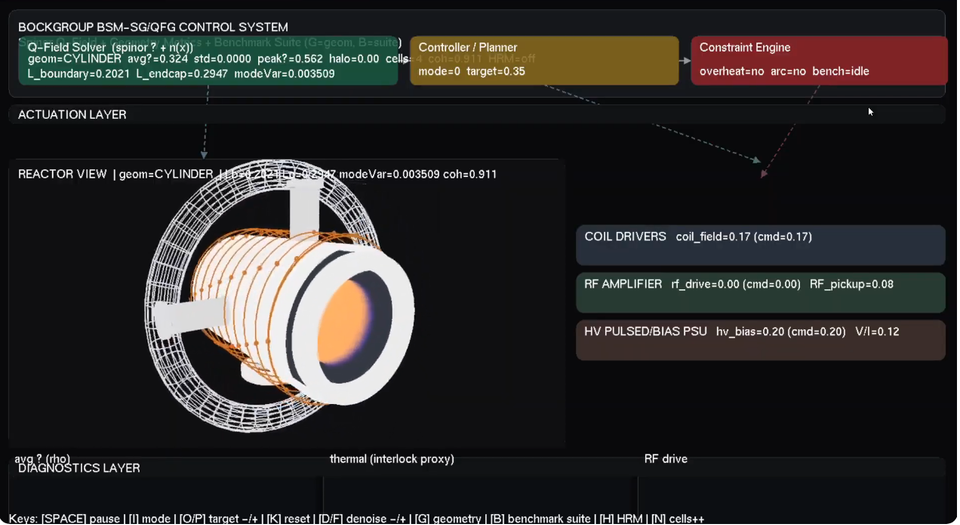
9. Plasma Reactor Simulation
In this video we show the latest version of our reactor simulation (BSM-SG-QFG/Helical Engine) and the results from the extended benchmark suite (15 benchmarks total), which tests how geometry and various control parameters affect YIELD, STAB (stability), LOSS (bound/endcap) and modeVar.
What’s in the video:
- Launching the benchmark suite and automatically running a series of tests.
- Geometry comparison with HRM OFF/ON:
CYLINDER, SPHERE, TOROIDAL_SPHERE, JAR_BELL. - Sweep tests (step-by-step parameter changes) with logging to CSV files:
- C: JAR_BELL – sweep of the number of “cells”
- D: CYLINDER – target value sweep
- F: JAR_BELL – MW port gain sweep
- G: CYLINDER – wallK sweep (wall influence)
- H: JAR_BELL – dielectric thickness sweep
- I: JAR_BELL – HRM frequency pair sweep (f1/f2)
- J: JAR_BELL – HRM MW modulation index sweep
- K: JAR_BELL – MW sigma sweep
- L: CYLINDER – wall_soft sweep
- M: JAR_BELL – wallK_diel sweep (dielectric “shell”)
- N: JAR_BELL – MW mix sweep
- O: JAR_BELL – HRM MW A0 sweep
- P: JAR_BELL – MW port position sweep (port position)
What we learned from the latest tests (briefly):
- Geometry has a clear effect on YIELD and losses (especially for CYLINDER).
- For CYLINDER, wall parameters (wallK / wall_soft) show strong sensitivity and visible changes in YIELD and stability.
- For JAR_BELL, the HRM and MW sweeps in the current range show minimal differences → the next step is wider ranges / stronger “drive” to verify when the system becomes sensitive.
All results are saved into CSV files (qfg_benchmark_A…P.csv) for further analysis and comparison between model versions.
10. HRM Simulation — Resonant Detection with Ionization + HV Gating
Core idea: HRM “combs” and detection are not produced by “heavy filtering”, but by synchronized excitation, ionization and gating windows, so the spectral signature rises above the background.
- fs / N / windowing: control of frequency resolution and spectral stability
- patch vs background: comparing local spectrum against background (SNR)
- pump bands: excitation frequencies/harmonics (comb structure)
- Ionization model: ion / ionReady / ionTau (rise/decay) as a “channel” that unlocks resonant response
- HV gating:
hvGate = hv_gate(P.hv_kV)— controllable window (e.g. 1.5…2.5 kV) that amplifies/enables HRM response - Detection rule: “HRM band peaks” when patch SNR exceeds a threshold and (burst + ionization + HV) conditions are met
What it demonstrates
- The resonant signature as conditional (not always present) — it requires sync of excitation + ionization + HV
- How gating and τ constants turn a noisy signal into clear combs
- A measurable criterion: SNR/peak/rms/scanHW → detection becomes “engineering”, not subjective
- A clear link between parameters (P, gap, HV, delay, patch, τ) and the visible spectrum/combs
11. Stage Pyro — QFG Safety Field (Particles + Shock + Perimeters)
Core idea: The safe zone is not a “drawn circle”, but the result of wave/field-driven risk (QFG hazard), changing in real time depending on the source, the medium, and shielding (φ).
- ψ = activity / medium load (density/energy “excitation” around sources)
- φ = shielding / protective field (reduces transfer/harm; “shielding”)
- Particles: sparks/smoke as local carriers of risk and exposure
- Shock/sound fronts: spherical component + directed (conical) boost + floor reflection
- QFG perimeters: deformed hazard isolines on the stage (marching squares), not a fixed radius
- Alarms: trigger on hazard threshold exceedance, not on geometric distance
What it demonstrates
- Safety as a dynamic function of fields and emissions, not static geometry
- Unification of particles + fields + shockwaves into one risk metric
- Realistic behavior: zones “breathe” with power/rates, ψ/φ and reflections
- Visual verification: isolines show where it is dangerous and why (shape/directionality)
One-line Summary (Conference-grade)
The QFG φΨ Engine explores physics as an emergent interaction between matter density (ψ) and vacuum structure (φ), using voxel-based field dynamics instead of equation-specific solvers.